안녕하세요. 여러분, 미루고 미뤄왔던 가스기사에 대한 포스팅을 시작하려고 합니다. 이제 긴 호흡으로 주욱 달려볼 텐데요. 가스기사를 공부하며 수험서만 가지고는 부족함을 느꼈습니다. 그래서 수험서에 고법, 도법, 액법의 3가지 법령과 특히, KGS Code를 곁들이는 방법을 추천드립니다.
2번째로, 가스기사 필기 5과목 중 '가스계측기기' 과목을 알아보겠는데요. '가스계측기기'는 실기시험과 거의 연계성이 없어 상대적으로 중요도가 낮으나 방심하면 의외로 과락이 잘 나오는 과목이니 시간분배를 잘하셔야 하는 과목입니다.
아울러 가스기사 시험 자체가 암기량이 아주 많은 시험이라 자주 보고 또 보고 해야하는데, 대중교통을 이용할 때 등 잠깐 잠깐 시간이 되실 때 가볍게 활용하기 좋은 포스팅으로 생각해주시면 감사하겠습니다. 꼭 암기해야 하는 부분과 제가 만든 암기법이나 재야에 떠돌고 있는 필살 암기법을 종종 넣을 예정이니, 합격하시는데 조금이나마 보탬이 되었으면 좋겠습니다. 자! 시작하겠습니다.

1. 계측기기의 원리 및 특성
(1) 계측기기의 개요
- 계측기기의 구비조건
- 경년변화가 적고, 내구성이 있을 것
- 견고하고 신뢰성이 있을 것
- 경도가 높고 경제적일 것
- 구조가 간단하고 취급 ,보수가 쉬울 것
(2) 측정
- 측정방법의 종류(암기법: 영천 편스 보분 치다. (경상도 '영천'에서 '편'의점 '스'레기 '보분'(훔치다.) '치다'.
- 영위법: 측정량과 기준량을 비교하여 측정량과 똑같이 되도록 기준량을 조정한 후 기준량의 크기로부터 측정량을 구하는 방법(Ex. 천칭을 이용하여 질량을 측정하는 것)
- 편위법: 측정량의 크기에 따라 지침 등을 편위시켜 측정량을 구하는 방법이다. 감도는 떨어지지만, 취급이 쉽고 신속하게 측정할 수 있다. (Ex. 부르동관 압력계, 스프링 저울, 전류계 등)
- 보상법: 측정량의 크기가 거의 같은 미리 알고 있는 양의 분동을 준비하여 분동과 측정량의 차이로부터 측정량을 구하는 방법이다.
- 치환법: 정확한 기준과 비교 측정하여 측저익 자신의 부정확한 원인이 되는 오차를 제거하기 위하여 사용되는 방법으로 다이얼게이지를 이용하여 두께를 측정하는 방법 등이 이에 해당한다.
- 오차
- 오차: 측정값과 참값과의 차이이다.
- 우연오차: 오차의 원인을 모르기 때문에 보정이 불가능하며, 여러번 측정하여 통계적으로 처리한다. 상대적인 분포 현상을 가진 측정값을 나타냄, 이러한 분포 현상을 산포라고 한다.
- 히스테리스(Hysteresis) 오차: 계측기를 구성하고 있는 톱니바퀴의 틈이나 운동부의 마찰 또는 탄성변형 등에 의하여 생기는 오차로 바이메탈 온도계, 벨로스 압력계 등에서 발생한다.
- 오차: 측정값과 참값과의 차이이다.
- 기차
- 기차: 계측기가 제작 당시부터 가지고 있는 고유의 오차이다.

- 정도와 감도
- 정도: 측정결과에 대한 신뢰도를 수량적으로 표시한 척도
- 감도: 계측기가 측정량의 변화에 민감한 정도를 나타내는 값으로 감도가 좋으면 측정시간이 길어지고, 측정범위는 좁아진다.
2. 자동제어
(1) 자동제어의 개요
- 자동제어의 정의: 감지기 및 센서로 부터의 신호를 읽고 목표치와 비교하면서 설비기기의 운전 및 정지 등 조작량을 제어하고 목표값에 가깝게 하는 명령입니다. 여기서 조작량을 목표값과 현재 위치의 차이에 비례한 크기로 생각하고 조금씩 조절하는 방법이 비례제어라고 한다. 비례제어의 일반적인 방식은 PID 방식이다.
- 자동제어의 구분
- 피드백 제어(Feed back control, 폐회로): 제어량의 크기와 목표값을 비교하여 그 값이 일치하도록 되돌림 신호(피드백 신호)를 보내어 수정동작을 하는 제어방식이다. 되먹임제어라고도 하며, 목표값에 정확히 도달할 뿐만아니라 제어계 특성이 높고, 외부조건의 영향을 덜 받는다.
- 시퀸스 제어(Sequence control: 개회로): 미리 순서에 입각해서 다음 동작이 연속 이루어지는 제어로 자동판매기, 보일러의 점화 등이 있다.
- 자동제어의 4대 기본장치: 조절부, 조작부, 검출부, 비교부
- 자동제어의 일반적인 동작 순서: 검출 → 비교 → 판단 → 조작
(2) 제어방법에 의한 분류
- 정치제어: 목표값이 일정한 제어이다.
- 추치제어: 목표값을 측정하면서 제어량을 목표갑셍 일치하도록 맞추는 방식으로 변화모양을 예측할 수 없다.
- 캐스케이드 제어: 두 개의 제어계를 조합하여 제어량의 1차 조절계를 측정하고 그 조작 출력으로 2차 조절계의 목표값을 설정하는 방법으로 단일 루프제어에 비해 외란의 영향을 줄이고 계 전체의 지연을 적게 하는데 유효하기 떄문에 출력 측에 낭비시간이나 지연이 큰 프로세스 제어에 이용되는 제어이다.
(3) 제어량 성질에 의한 분류
- 프로세스 제어: 공장 등에서 온도, 압력, 유량, 농도, 습도 등과 같은 상태량에 대한 제어방법을 말한다.
- 다변수 제어: 보일러에서 연료의 공급량, 공기 공급량, 보일러 내의 증기압력, 급수량 등을 각각 자동으로 제어하면 발생 증기량을 부하변동에 따라 항상 일정하게 유지시켜야 한다. 이때 각 제어량 사이에는 매우 복잡한 자동제어를 일으키는 경우가 발생한다. 이 러한 경우를 다변수 제어라 한다.
- 서보기구: 작은 압력에 대응해서 큰 출력을 발생시키는 장치이다. 물체의 위치, 방위 등의 기계적 변위를 제어량으로 하는 제어계로서 목표치의 임의의 변화를 항상 추종시키는 것을 목적으로 한다.
728x90
(4) 조정부 동작에 의한 분류
① 비연속동작
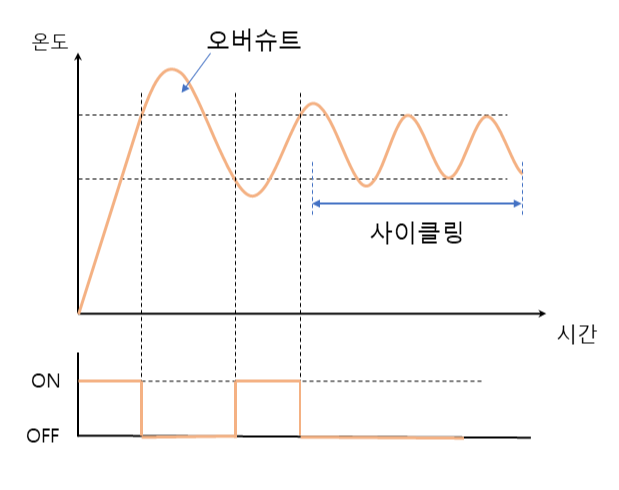
- 온오프동작(2위치 동작): 수조의 온도를 25℃로 유지하고 싶을때 수조의 온도가 25℃보다 낮으면 히터를 ON하고, 25℃보다 높으면 OFF하는 제어 방식을 온-오프 제어라고 한다. ON-OFF를 반복하기에 기계적이나 적기적으로 좋지않다. 온도가 설정 온도보다 높이지면 히터를 즉시 끈다. 그러나 관성이라는 것이 있기에 OFF 후에도 일시적으로 온도가 상승한다. 반대로 마찬가지이다. 이처럼 지나친 양을 오버슈트라고 한다. 아래 그림과 같이 설정값의 주변에서 온도의 파도가 진동하는 현상은 외란에 의해 발생하는 것이 아니라, ON-OFF 제어 동작에 기인하는 것이다. 이와 같이 제어동작으로 인해 실제 값의 변수가 물결치는 것을 헌팅이라고 한다. 따라서, ON-OFF제어는 정밀도가 그다지 필요하지 않은 산업현장에서 많이 사용된다.
- 편차의 정(+), 부(-)에 의하여 조작신호가 최대, 최소가 되는 제어동작이다.
- 2위치 제어 또는 뱅뱅제어라고도 한다.
- 외란에 의한 잔류편차(Off-set)가 아닌, On-Off 동작에 의한 잔류편차가 발생한다.
- 사이클링(Cycling) 현상을 일으킨다.
- 주로 탱크의 액위를 제어하는 방법으로 이용한다.
- P 동작(비례동작: Proportional action)
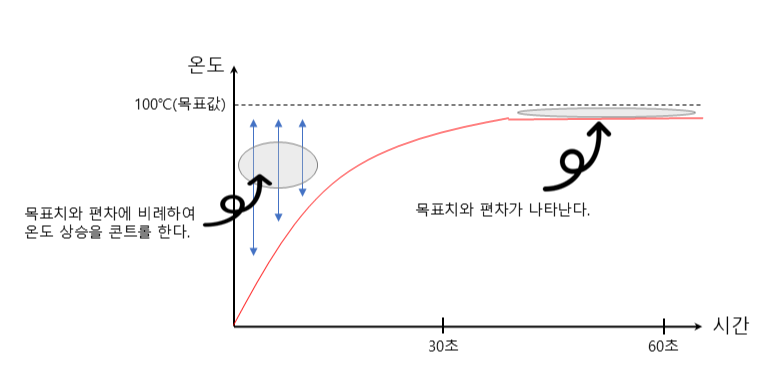
- ON-OFF 제어보다 결과의 정확도를 높일 수 있는 자동제어 방식으로 비례제어가 있다. 범위의 조작량을 측정값의 변화에 따라 0~100% 사이를 연속적으로 변화시키는 것을 말합니다. 일반적으로 설정값은 비례대역의 중심에 놓는다. ON-OFF 제어에 비해 헌팅이 작고 부드러운 제어가 가능하다. 보일러를 예로 들면, 목표값과 현재값이 차이가 크면 온도를 크게 올리고 목표값에 가까워지면 온도 상승을 서서히 줄이는 것처럼 온도를 제어합니다. 사실 이렇게 하면 비례제어로 잘 제어할 수 있다고 생각하지만, 목표치에 근접하게 되면 목표치와 편차가 적어, 조작량이 너무 미세하게 되고 조작이 멈춰버리게 되어 목표값과 미세한 편차가 발생하게된다. 이러한 문제를 해결하기 위해 고안한 것이 PI제어(비례적분제어)이다.
- 사이클링(상하진동)을 제거할 수 있다.
- 부하변동 등의 외란이 있으면, 잔류편차가 발생한다.
- 비례대(PB, Proportional Band): 공식을 잘 보면 알겠지만, 목표치와의 편차가 크면 큰 %로 작으면 작은 %로 제어 하겠다는 것임.
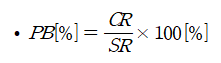
여기서, CR: 제어범위(제어기 측정온도차), SR: 설정 조절범위(비례제어기 온도차 또는 조절온도차)
- 조절부 동작의 수식 표현

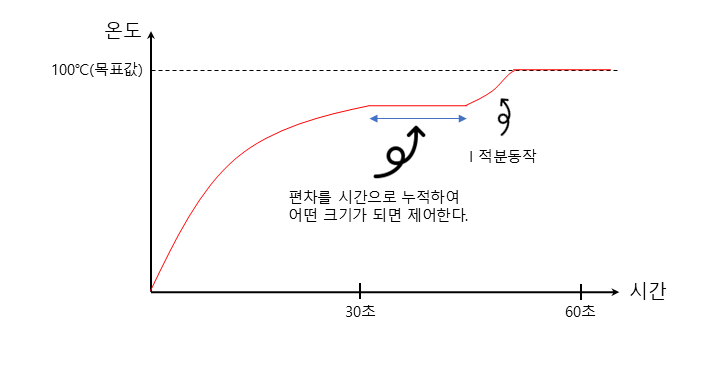
- I동작(적분 동작, Integral action): 편차를 시간적으로 축적하고 축적된 양을 설정량과 비교하여 편차를 재설정하여 편차를 없애는 방식으로 작동한다.
- 잔류편차(Off-Set)가 제거된다.
- 진동하는 경향이 있어 제어의 안정성이 떨어진다.
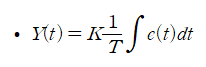
여기서, K: 비례상수
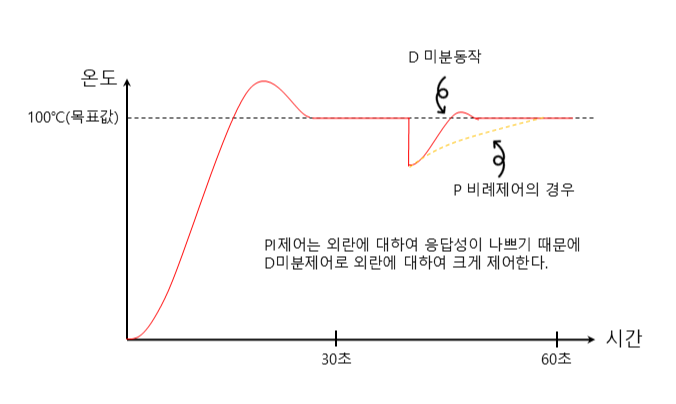
- PI동작(비례적분 동작): 비례 동작의 결점인 잔류편차가 남는 현상을 줄이기 위하여 비례 동작에 적분동작을 합한 것이다. PI제어는 결함이 없을 것이라고 생각하지만, 목표치에 맞추기 위해 편차를 축적하는 시간이 필요하다는 특성이 있습니다. 예를들어 선박의 운전제어처럼 역풍(맞바람) 등으로 속도를 크게 방해하는 외란이 발생한 경우, PI제어는 편차를 축적하기 위해 어느 정도 시간이 소요되므로 불편한 경우가 생기게 되며 이를 보완한것이 PID제어이다.
- 잔류편차(Off-Set)가 제거.
- 전달 느림이나 쓸모없는 시간이 크며 사이클링의 주기가 커진다.
- 부하가 급변할 때는 큰 진동이 생긴다.
- 반응속도가 빠른 공정이나 느린 공정에서 사용된다.
- D동작(미분 동작, Derivative Action): 미분 동작은 측정 시점 편차와 바로 전 측점시점간의 편차를 비교하여 그 차이로 제어하는 것이다.
- 단독으로 사용되지 않고 언제나 비례동작과 함께 쓰인다.
- 일반적으로 진동이 제어되어 빨리 안정된다.
- 응답시간이 빨라져서 제어의 안정성이 높아진다.
- 오버슈트를 감소시킨다.
- 잔류편차가 제거되지 않는다.
- PID(비례·적분·미분 제어): PI제어에서 개선되어야 하는 사항은 응답시간입니다. 예를 들어 외란이 발생한 경우 제어가 듣지 않는 상태에 빠질 수 있다. 이렇게 비례 동작에 적분동작과 미분동작을 추가한 거을 PID제어라 한다. PID 제어는 조작량에 민첩하고 빠르게 조작량에 반응하여 목표값에 빠르게 도달하는 제어방식이다.
- 잔류편차와 진동이 제거되어 응답시간이 가장 빠르다.
- 피드백 제어는 미례미적분 제어(PID Control)를 사용한다.
728x90

댓글